


Denis Fadeyev
Specialization: robotics technology. Training period: EPFL, Switzerland.
 The 25-year-old master, and in his spare time the guitarist and drummer, is a fellow countryman of the famous Kazakh geologist Shakhmardan Yesenov. He is from Kyzylorda. Having outcompeted 92 applicants, Denis won a grant n.a. academician and went to the Swiss Ecole polytechnique fédérale de Lausanne (EPFL), where he developed an algorithm to control a robotic hand.
The 25-year-old master, and in his spare time the guitarist and drummer, is a fellow countryman of the famous Kazakh geologist Shakhmardan Yesenov. He is from Kyzylorda. Having outcompeted 92 applicants, Denis won a grant n.a. academician and went to the Swiss Ecole polytechnique fédérale de Lausanne (EPFL), where he developed an algorithm to control a robotic hand.
What is it all about, Denis, what is it for?
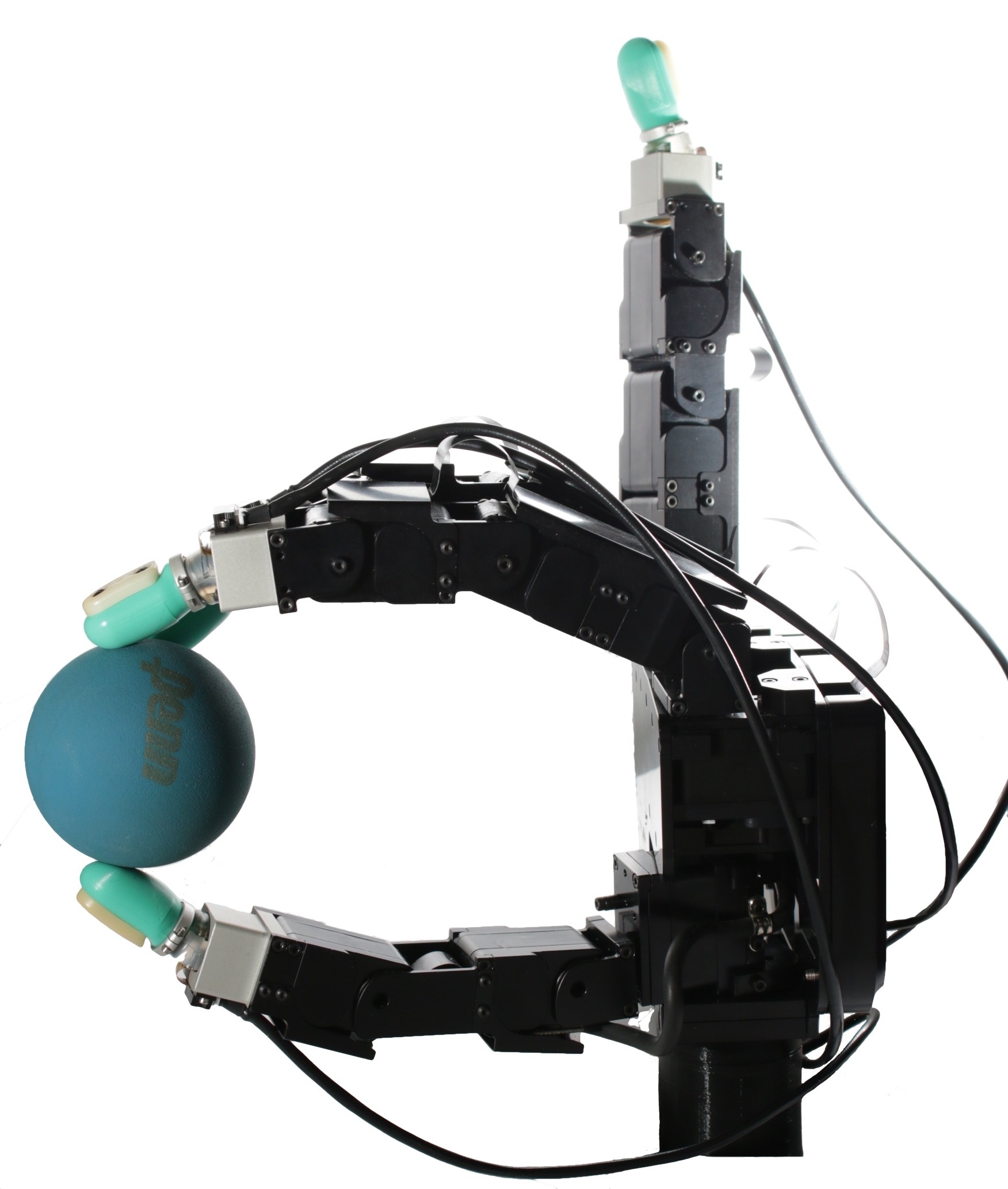
The main problem of controlling a robotic hand is to repeat in the robot the accuracy with which a human can control the strength and movement of his/her hand. A robotic hand is used as part of a humanoid robot or manipulator, in robotic prostheses and exoskeletons. The laboratory where I spent my training period is engaged in the development of algorithms for more precise control of the hand.
The most vivid impression of the grant competition of the fund: what was the most special about it?
The competition was held in two stages, and of course the final, which was held in the form of an interview game, was the most memorable. It was interesting to listen to other contestants and to participate in logical team games. I think that such a selection format is rarely carried out, and its undoubted advantage is that in the process you can meet and talk with different people, even though they are your competitors.
… and quite strong. Why did you win?
Honestly, I was shocked when I learned that I was one of the grant winners. I think the main thing in this competition is to show that you are interested in science and its development, and you have a goal that you would like to accomplish in the near future.
How was the training period?
I was undergoing the training at the Learning Algorithms and Systems Laboratory (LASA). The professor appointed two doctoral students who worked with me for three months. The first month I examined the existing codes and the work of previous students in the desired field. After he began to develop his algorithm in the simulation. As soon as I started getting results, I was given a real hand and sensors that I installed on it. Algorithm testing has begun. I am glad that I managed to finish the experiments.
What are the training results for you?
We have successfully tested my algorithm. Our task was to capture a parallelepiped from a horizontal position. Testing in the real world was done on AllegroHand, with TekScan tactile sensors installed on it. I learned and gained experience in using and applying control algorithms to control the force between the hand and objects. I can now work in the operating system ROS and the simulation environment Gazebo. They are very widely used in robotic research around the world. So these skills have already become my advantage in the resume.
{kind=link}
In what interesting thing did you involve yourself besides science in Switzerland?
I met a group of other students undergoing the training at the university, two of whom were in my laboratory. Sometimes we gathered on a barbecue at the lake, swam, rested. The university itself is located on the shores of the lake, from where there is a great view of the Alps.
What are you planning to do next? What to learn?
I just received my master’s degree, defended my thesis. In my future plans, admission to doctoral programme in the field of control of robotic hands and manipulators using machine learning. I would like to create a common platform of algorithms, suitable for smart and strong control of different types of hands. This is my plan.
10.06.19, Stories
Seen by: 216